
|
|
|
 |
|
|
In neurosurgical field, highly specialized education and training for physicians are urgent demanded, at the same time, development and improvement of the art medical equipment are very essential. In this study, our purpose is to develop a “robot-assisted minimal invasive brain surgery system” to help physicians to improve the operation of the neurosurgical surgery. At present, Japan has become an aging society; social significance is very high to develop advanced medical support, rehabilitation and life support systems.
|
|
|
Final Goal and Experimental Systems
|
|
|
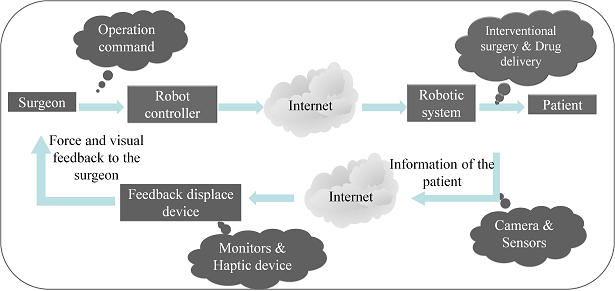
In the research, robot-assisted minimal invasive brain surgery system will be built; visual feedback and force feedback will be sent to the physicians together when operating. In the other hand, auto danger avoiding mechanism has been designed based on force sensors at the end tip of the catheter, physicians will get remind by both haptic and visual system as the same time.
|
|
|
|
Tele-operated Catheter Surgery System |
|
|
|
Research Topics and Main Results |
|
|
In this research, a fiber sensor was set at the end-top of the catheter and force sensors were set at the side of the catheter near the top so that the force information could be get at any moment. In order to operate the catheter through the master machine, a catheter support system was developed which has the function of automatic danger avoidance during the operation. Using this trial-manufacture system, the catheter operation in a simulation model was accomplished.
|
In the future, because the dangerous area of the force sensor depends on the real blood vessel model, change of the force sensor in the blood vessel treatment should be studied for the experienced doctor and inexperienced doctor so that the security of the operation in the real treatment could be improved.
|
 |
 |
|
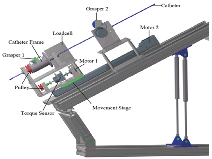
Catheter Manipulator – Slave side |
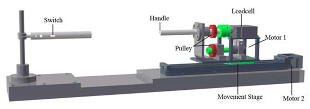
Robot Controller – Master side |
 |
|
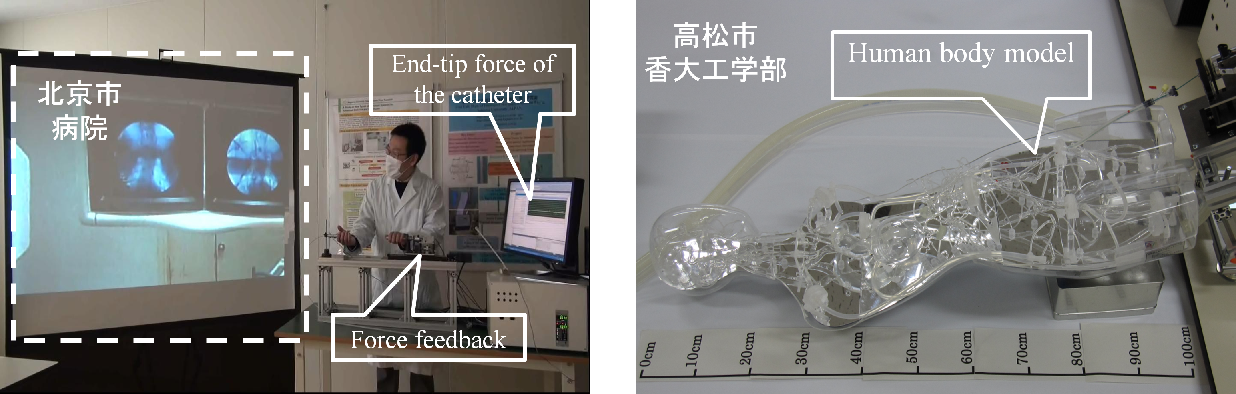
Kagawa University (Master)
 Hospital in Beijing(Slave) Hospital in Beijing(Slave) |
Hospital in Beijing(Master)
Kagawa University(Slave) |
|
Remote Control Experiment, Takamatsu, Japan
 Beijing, China Beijing, China |
|
|
|
This research could be used in cerebral neurosurgery field which needs very exact technology to bring up high expert doctors. Besides, some researches have been made to use the result in the field of circulator, peptic, radiation and so on. The establishment of minimal invasive medical support technology will not only become the advanced medical technology in the world but also be expected in application as industry.
|
|
|
|
・Kagawa University Characteristic Prior Research, 2009 - 2011
・Special Fund Project of the Ministry of Education, Culture, Sports, Science and Technology in Japan,
2010 - 2013
|
|
|
|
 |
|
Our achievements
Reported in CCTV13 |
 |
|
VR Training System based on our novel catheter operating system |
 |
|
Experiment on
Interaction between Catheter and Blood Vessel in Virtual Reality Environment
|
|
| Copyright © 2022 Southen University of Scince and Technology. GUO-LAB All Rights Reserved. Visitors: 207590
|
| | |