|
|
 |
|
|
Bio-inspired underwater microrobots with multiple degrees of freedom (DOF) that can walk and swim smoothly in water or aqueous media are of great interest for underwater monitoring operations including pollution detection, video mapping, exploration of unstructured underwater environments, and other tasks.
|
|
|
Problems in the Previous Researches |
|
|
・ Point precision: Until now, most of the underwater biomimetic microrobots are designed with
swimming motion.
・ Flexibility: Just focused on one of underwater motions.
・ Multi-functionality: Driven with an open-loop control, could not implement simple tasks such as
detecting and grasping some objects.
|
|
|
|
|
|
・ To aim at underwater microrobots with compact structure, multi-functions, and flexibility used for
underwater exploration in limited spaces.
・ Scientific research of the bio-inspired locomotion for the microrobot design.
|
|
|
Prototype Biomimetic Microrobots |
|
|
・ Proposed and proved the feasibility of four kinds of bio-inspired locomotions.
・ Developed several kinds of underwater microrobots and summarized the design methods for
efficient and precise underwater locomotions.
・ Developed a close loop control system for the microrobots to implement the obstacle avoidance
experiment.
|
|
|
|
 |
 |
|
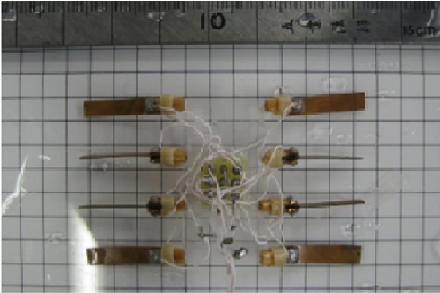
Stick insect-inspired legged microrobot |
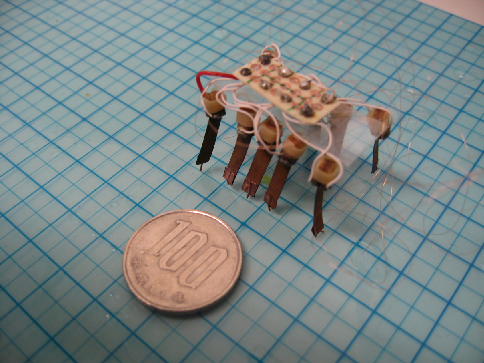
Inchworm-inspired Ten Legged Microrobot |
 |
 |
|
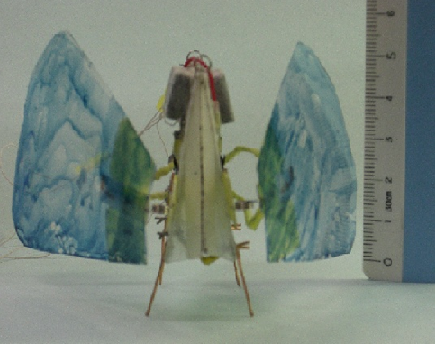
Butterfly-inspired Hybrid Underwater Microrobot |
Fish-like underwater Microrobot |
|
|
 |
|
The insect-inspired biomimetic underwater microrobot actuated by 10 ICPF actuators can realize the walking, rotating, floating and grasping motions. |
 |
|
The wireless control fish-like underwater microrobot actuated by 1 ICPF actuator can realize the swimming motion. |
|
 |
|
Our achievements reported in CCTV13 |
|
| Copyright © 2022 Southen University of Scince and Technology. GUO-LAB All Rights Reserved. Visitors: 207590
|
|