|
|
 |
|
|
Robot-mediated rehabilitation attracted more and more researcher乫s interest due to its high research value and strong applicability. With increasing of the elder and stroke patients, medical resource in hospital is not enough obviously, so that home rehabilitation is strong needed. In our research, a novel portable exoskeleton device is developed for upper limb rehabilitation, which is light and compliant to human upper limb.
|
|
|
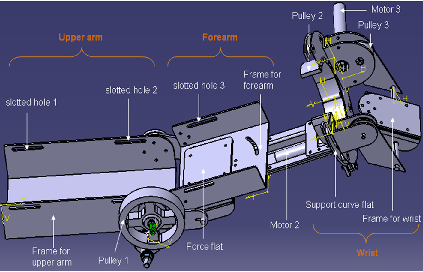
Design of the Novel Exoskeleton Device |
|
|
丒 It provides three active motions (elbow F/E, forearm P/S, wrist F/W).
丒 Design of four passive DoFs make it more compliant to human limb.
丒 The structure of drivetrain can support multi-training modes.
丒 It is light and potential to be used in home-rehabilitation.
|
|
 |
 |
|
Design of the novel exoskeleton device |
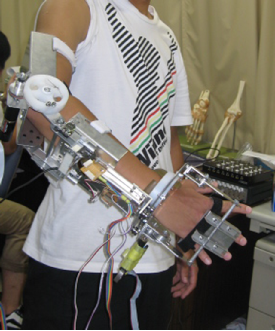
Experimental setup |
|
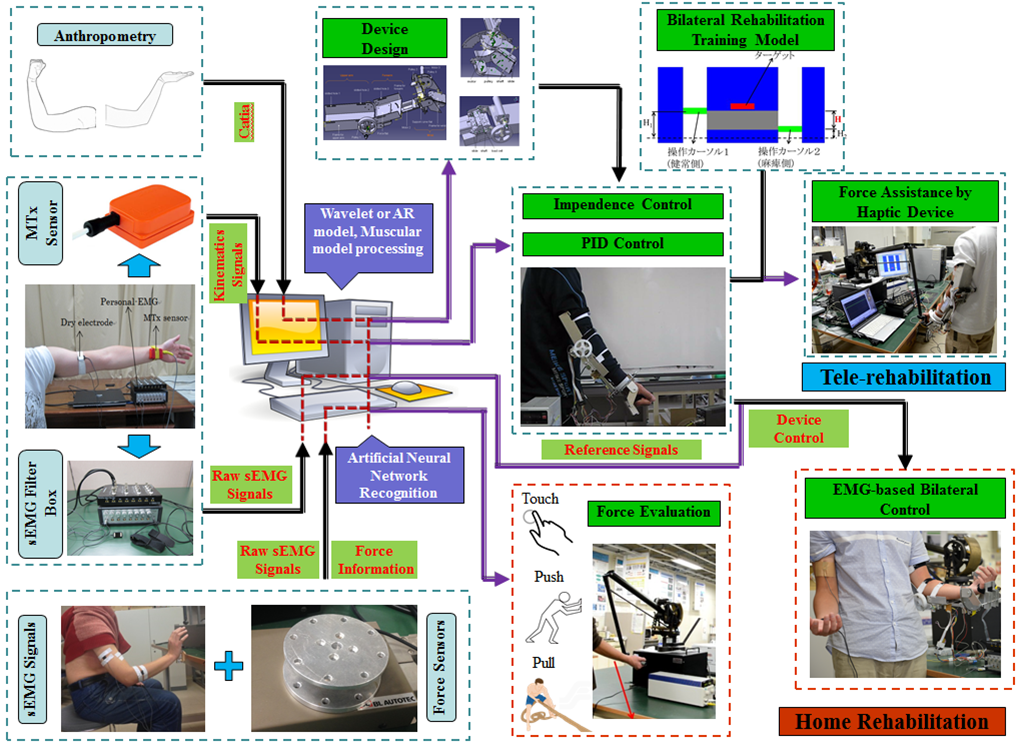
Research Topic and Selected Results |
|
|
丒 Implement passive training based on master-salve manipulation system using a haptic device.
丒 Implement active training through improving traditional impedance control.
丒 Implement bilateral training through two approaches; one is resolving motions of upper limb using
丂丂
haptic device and the other is recognizing motions using sEMG signal.
|
 |
|
Bilateral rehabilitation system |
|
|
|
 |
|
The VR-based experiment of a subject's upper extremity trained to track a virtual upper limb. |
 |
|
A 3 DoFs exeskeleton device for upper limb rehabilitation |
|
 |
|
Experiments of providing impedance to the subject who wears the exoskeleton device |
|
|
| Copyright © 2022 Southen University of Scince and Technology. GUO-LAB All Rights Reserved. Visitors: 207590
|