|
|
 |
|
|
脳神経外科分野は、手術の難易度も高く、医師に対する高度で専門的な教育訓練と最先端の医療機器の改善・開発等が必要不可欠である。本研究では本学の医・工学部の連携により、最先端の医療支援技術開発システムである「低侵襲脳外科血管手術支援システム(高機能シミュレーター)」の開発等を通じて、繊細な技術を要する脳神経外科手術を支援することを主な目的とする。高齢化を迎えた我が国において、高度な医療支援、リハビリおよび生活支援システムを開発することは社会的意義が非常に大きいといわれる.
|
|
|
|
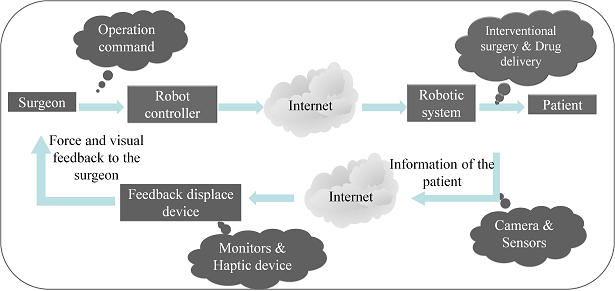
カテーテルを操作するための視覚と力覚を組み合わせたことにより、シミュレーションモデルを使用し、モデル内でカテーテルを操作し、カテーテル先端の力覚情報をファントムへの力フィードバックと視覚的情報により取得し危険を自働回避する最先端の医療支援技術開発システムである「低侵襲脳外科血管手術支援システム(高機能シミュレーター)」の開発を行う。
|
|
|
|
遠隔手術支援システム |
|
|
|
|
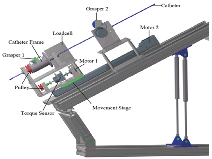
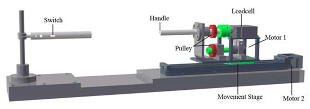
本研究では、先端には光ファイバー圧力センサー、先端近傍の側面に圧力センサーを配置し、力覚情報を随時に取得し、マスターでカテーテル操作を行えるように、操作の危険を自動的に回避できるカテーテル操作用支援システムを開発した。試作したシステムに対して、カテーテル操作をシミュレーションモデル内で行い動作を確認した。今後、圧力センサーの危険域を実際の血管モデルなどを用いて決定し、血管内治療の熟練者と初心者での圧力センサーの変化を調べることで、実際の治療時の安全性を高められる。
|
 |
 |
|
Catheter Manipulator – Slave side |
Robot Controller – Master side |
 |
|
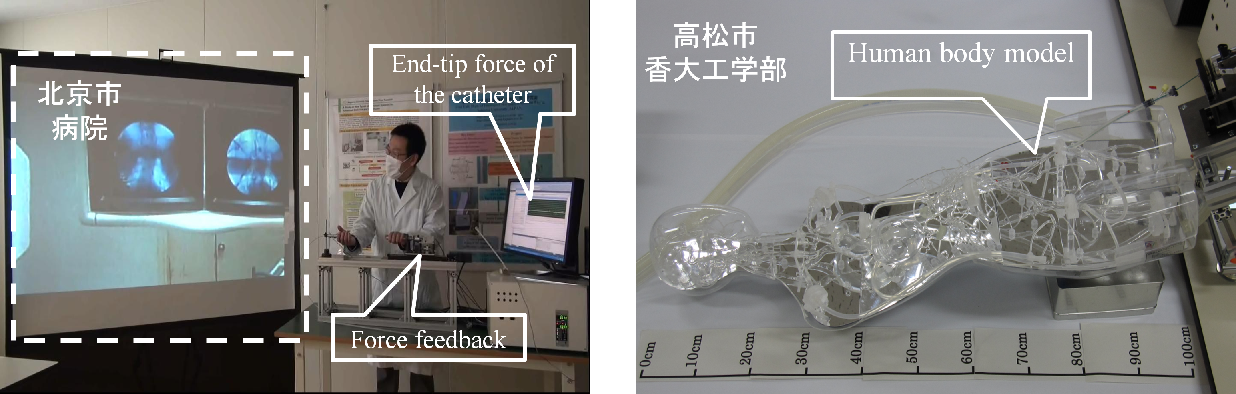
香大工学部(Master)
 北京市病院(Slave) 北京市病院(Slave) |
北京市病院(Master)
香大工学部(Slave) |
|
日本高松市香大工学部
 中国北京市病院との遠隔操作実験 中国北京市病院との遠隔操作実験 |
|
|
|
本研究の開発成果を活用し、繊細な技術を要する脳神経外科分野で活躍できる高度専門医を育成することを主な目的としているが、循環器科、消化器外科、放射線科等他分野における応用も視野に、研究に取りこんでいる。低侵襲の医療支援技術の確立により、医療技術においても世界をリードするだけではなく産業への応用も可能であると期待される。
|
|
|
|
・香川大学特色ある重点研究プロジェクトに平成21年度採択
・文部科学省特別経費(プロジェクト分)プロジェクトに平成22年度~24年度採択
(高度な専門職業人の養成や専門教育機能の充実)
・ 脳神経外科専門医育成研修、学生実習(医学部5~6年生)への実用化検討中
|
|
|
|
 |
|
CCTV13で放送しました |
 |
|
VRシステム |
 |
|
仮想現実環境におけるカテーテルと血管の相互作用に関する実験
|
|
| Copyright © 2022 BEIJING INSTITUTE OF TECHNOLOGY. GUO-LAB All Rights Reserved. Visitors: 207590
|
| |