|
|
 |
|
|
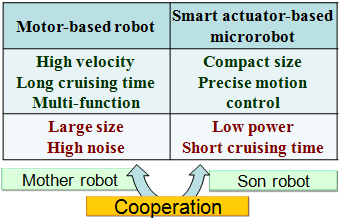
Motor-based underwater robots cannot implement precise operations in narrow or complicated environments. And smart actuator-based underwater microrobots cannot realize high velocity and long cruising time. For solving these problems, we developed a mother-son robot system that can be used in a wide range of underwater applications.
|
 |
|
|
|
・Propose a mother-son robot system based on the cooperation of motor-based robot and microrobots, to take advantage of both kinds of robots.
・Develop an amphibious spherical mother robot for the proposed system.
・Develop a mechanism for mother-son robot cooperation.
|
|
|
|
|
|
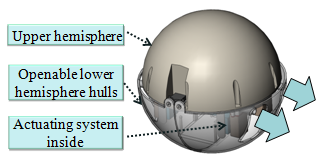
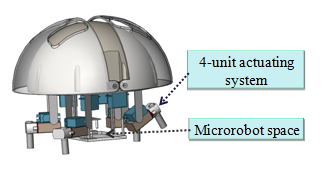
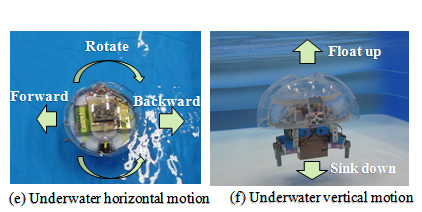
The amphibious spherical mother robot consists of an upper hemisphere, 2 openable lower hemisphere hulls, 4 actuating units and a space for carrying microrobots.The mother robot has a diameter of 250mm. One actuating unit is composed of 2 servo motors and a water-jet thruster. By using the actuating units, robot can realize the motions on land and under the water.
|
|
 |
 |
|
Underwater structure of the robotic system |
On-land structure of the robotic system |
|
|
|
|
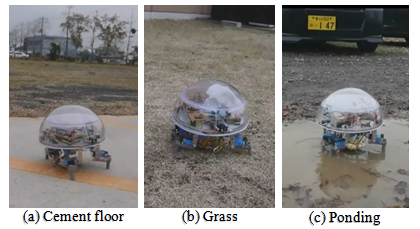
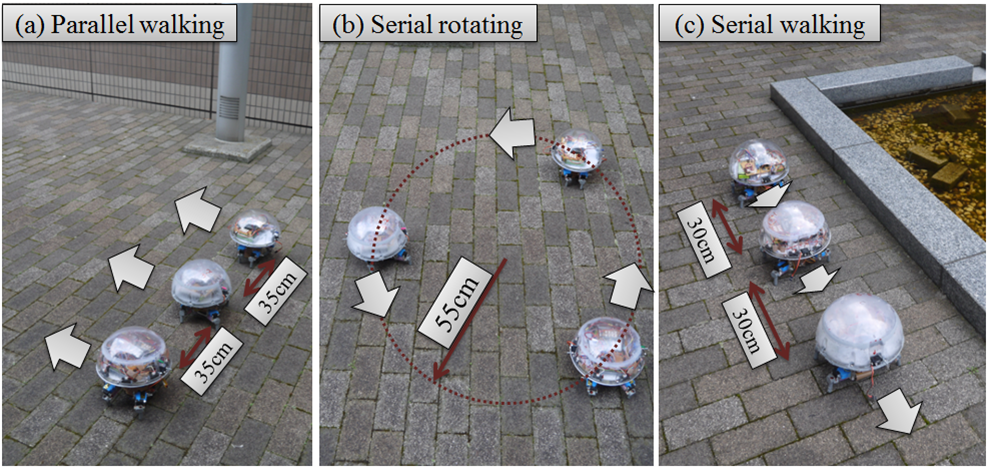
・By the on-land quadruped walking motions, the robot can adapt to a variety of terrain. The maximal walking speed of the robot is 22.5cm/s.
・The robot has a vectored water-jet mechanism. The actuating force can be controlled by PWM signals. The maximal horizontal speed of the robot is 16.1cm/s.
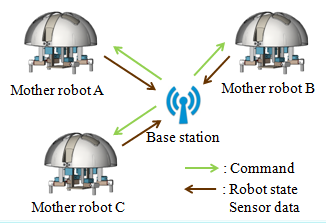
・Implement the multi-robot cooperation.
|
 |
 |
|
On-land locomotion |
Underwater locomotion |
|
|
|
 |
 |
|
Multi-robot cooperation |
|
|
|
|
|
 |
|
さまざまな地形での歩行動作 |
 |
|
水陸両用の移動 |
 |
|
マルチロボット陸上協力 |
 |
|
マルチロボット水中協力
|
|
| Copyright © 2022 BEIJING INSTITUTE OF TECHNOLOGY. GUO-LAB All Rights Reserved. Visitors: 207590
|
| | |