|
|
 |
|
|
マイクロマシン技術の発達とニューアクチュエータの開発に伴い,局所作業用ロボットの構想が提案されている.こうした構想の中に,駆動時に生物的な柔軟さを持った,高分子アクチュエータを用いたものがある.また,従来の水中歩行ロボットは構造が複雑で,小型化が困難である.そこで本研究では,小型化が可能で,低電圧駆動ができ,応答性に優れ柔軟な高分子アクチュエータである,IPMC(Ionic Polymer-Metal Composite)アクチュエータを用いて,小型構造,多自由度という観点に基づき,多機能な水中マイクロロボットの提案と試作及び,その性能評価を行う.さらに,作業を行うためのツールの搭載を目的とした,水中マイクロロボットの安定した移動の実現を目指す.
|
|
|
|
具体的に,本研究の背景として,IPMCアクチュエータを用いた脚を利用して歩行,浮上,遊泳する水中マイクロロボットがあったが,これは歩行時の姿勢の安定性が低く,ツールを搭載しての作業を行うことは困難である.そこで本研究の目的は,多様な作業を行うためのツールの搭載を目的とした,また,IPMCアクチュエータを用いた水中歩行,遊泳,ハンドリング,浮上ハイブリッドマイクロロボットの提案と試作及び,その性能評価を行うことである.
|
|
|
|
|
|
・ 作業を行うためのツールの搭載を目的とした,歩行,回転,ハンドリング,浮上ハイブリッド水中マイクロ
ロボットの提案と試作
・ 試作したマイクロロボットの性能評価のため,動作実験と歩行速度のモデル化を行う
・ 水中マイクロロボットの制御方法を構築する
・ 水中マイクロロボットの積載量の評価のため,歩行機構の力学解析を行う
|
|
|
|
 |
 |
|
Stick insect-inspired legged microrobot |
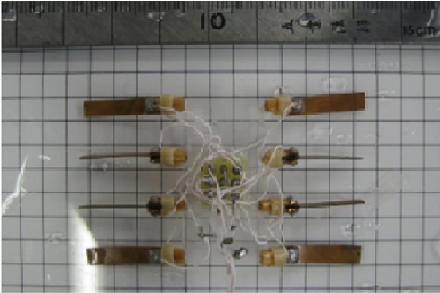
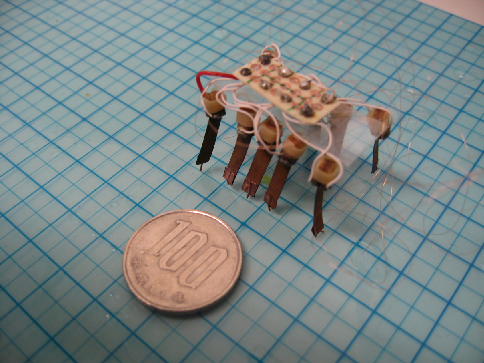
Inchworm-inspired Ten Legged Microrobot |
 |
 |
|
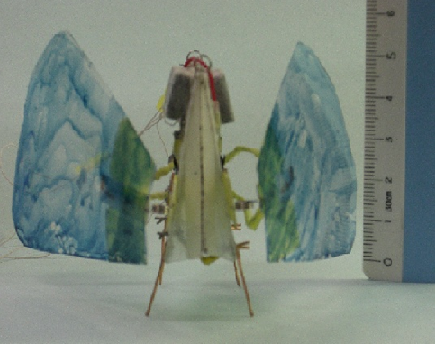
Butterfly-inspired Hybrid Underwater Microrobot |
Fish-like underwater Microrobot |
|
|
 |
|
この昆虫型バイオミメティックス水中マイクロロボットは10枚のICPFアクチュエータに駆動され、歩行、回転、浮上、ハンドリングを実現することができる。 |
 |
|
1枚のICPFアクチュエータに駆動された無線制御の魚型水中マイクロロボットは水泳を実現することができる。 |
|
 |
|
CCTV13で放送しました |
|
| Copyright © 2022 BEIJING INSTITUTE OF TECHNOLOGY. GUO-LAB All Rights Reserved. Visitors: 207590
|
|