|
|
 |
|
|
Researches on autonomous underwater robots have become a hot spot all around the world. Many different autonomous underwater robots have been developed. Our research is about the spherical underwater robots equipped with water-jet-based propulsion system. The propulsion system makes it more flexible when robots carry out motion in water. And we also develop multi-robot system to realize the cooperative and collaborative tasks in the water.
|
|
|
|
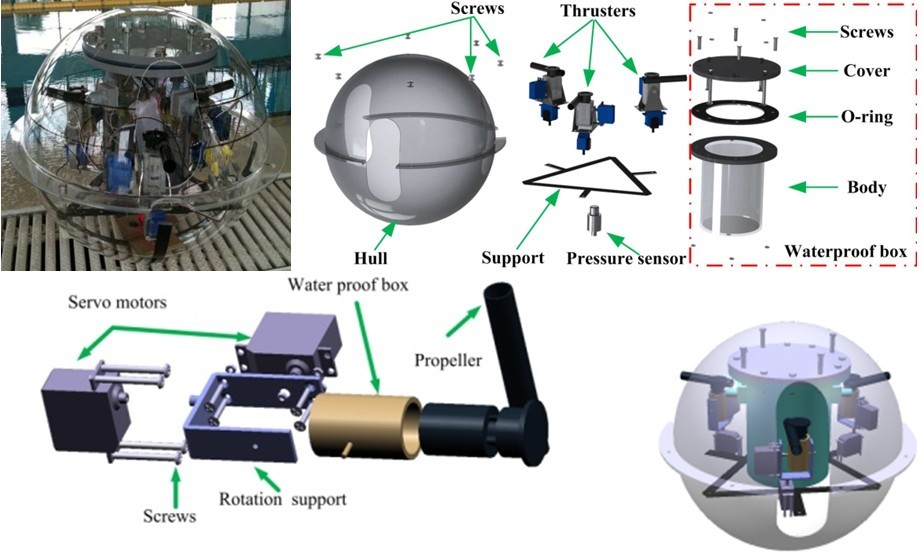
・Spherical shape, water-jet propulsion system (The original concept of the research)
・Multi vectored water-jet-based propulsion system.
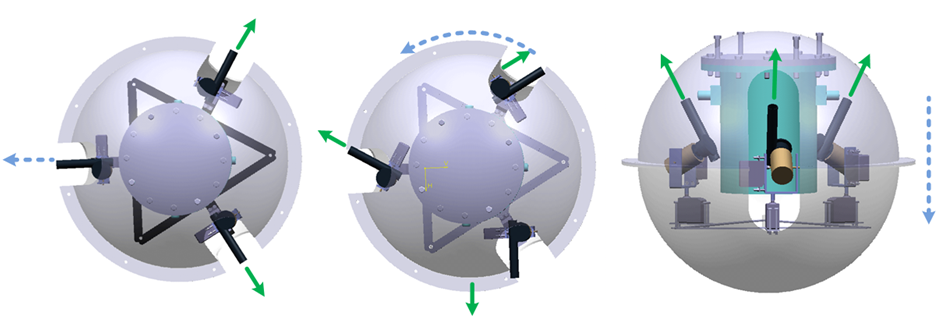
・Flexible motions in surge, heave and yaw.
・Modularity of components, easy to be assembled.
・Intelligent altitude control; intelligent cooperation.
|
|
 |
 |
|
Structure of the robotic system |
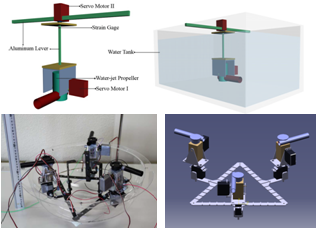
The vectored water-jet-based propulsion system |
|
|
|
|
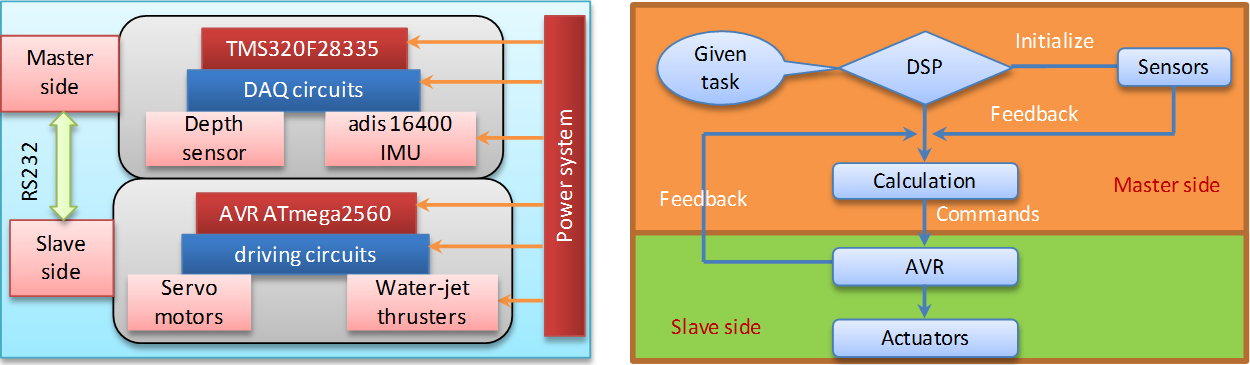
We designed a master- slave structure for the control hardware. The master side response for strategies decision, and the slave side response for driving the actuators and sensors. This two-level hardware structure make it more efficient in motion control and sensors feedback, and also improve the controllability in real-time.
|
|
|
|
|
The architecture of the control system
|
 |
 |
|
Hardware and control system |
Basic motions |
|
|
|
|
|
・Our goal is to make our robots can collaboratively carry our tasks.
・The robot can play a role of mother machine to carry those micro underwater robots.
|
 |
 |
|
The collaborative observation |
Mother machine |
|
|
|
 |
|
球形水中ロボットの垂直運動実験 |
 |
|
球形水中ロボットの水平運動実験:(a)線形運動 |
 |
|
球形水中ロボットの水平運動実験:(b)270度回転
|
|
| Copyright © 2022 BEIJING INSTITUTE OF TECHNOLOGY. GUO-LAB All Rights Reserved. Visitors: 207590
|
| |